

Welcome to uavster's blog (filtered)
You are currently browsing posts related to Autonomous Robotics. Perhaps you prefer to browse all posts.
Attitude estimation on iPhone
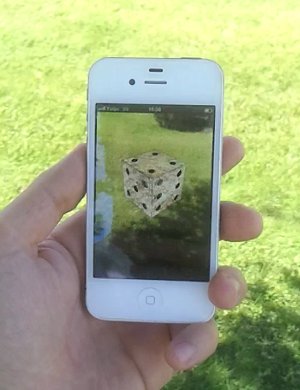
Stand up and close your eyes. If you have superpowers and managed to memorize this text before doing so, you'll be now reading it in your mind. Now, try to walk straight for two meters towards somewhere [...]
In order to know their spatial orientation and keep balance, robots use Inertial Measurement Units (IMU). They are composed of accelerometers, gyroscopes and, sometimes, magnetometers that measure linear [...]
Thanks to MicroElectroMechanical Systems (MEMS), the components in an IMU today can be embedded into chip-like casings and consume very low power. This opened the door some years ago to the inclusion of [...]
We got two awards in IMAV 2012!
Home, sweet home. My luggage is laying on the floor, as exhausted as me. I arrived yesterday from Braunschweig, Germany, but went straight to bed for a mandatory energy charge. I slept for an insane number [...]
1) Special Award for the "Best Automatic Performance"
2) 2nd place in the Indoor Flight Dynamics Challenge
According to the organization, our drone was the first one in the history of the competition to pass the challenge without any human intervention, entirely on its own. This is the reason [...]
My colleague Jesús Pestana did an amazing job with the position estimation and high-level controllers (trajectory and mission). My contributions were the software framework, visual speed estimation, [...]