

Welcome to my site
My name is Ignacio (Nacho) Mellado. I build intelligent machines with visual perception and control. In this website you will find a selection of my projects, experiments and random thoughts.
How to get into robotics if you are a CS major
I was recently asked by a Computer Science (CS) major about a good roadmap to get into robotics. This is was my response, in case it can help someone else:
My approach to learning is normally by making. If that’s the case for you too, the best way to learn to make your own robot is starting to make your own robot. That should be the forcing function [...]
Linear algebra: to express locations and movements of the robot and other things in 3D, e.g. vectors, homogeneous matrices, quaternions… There's a lot of overlap with 3D graphics here.
Synchronization: robots are almost always distributed systems; even when there’s only one processor, there are many independent sensors and actuators that can’t be queried/commanded [...]
How I hacked a vintage C++ compiler to support exceptions before they were standard
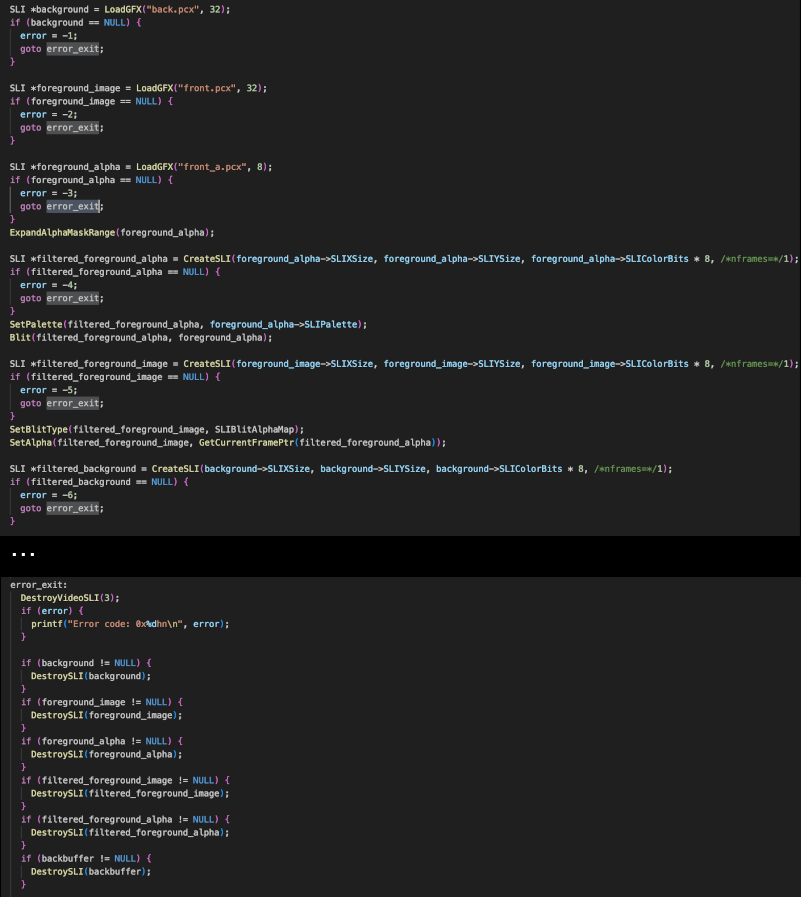
TL;DR I hacked a 28-year-old C++ compiler to support exceptions. That’s two years before exceptions were even part of the first C++ standard!
The compiler is the Watcom C++32 Optimizing Compiler Version 11.0, from 1996, by Sybase, Inc. Around that time, some friends and I started a real-time graphics [...]
Fig. 1: The Watcom C++32 Optimizing Compiler Version 11.0 running on DOSBox.
Years later, I resumed maintaining the library. Real-time code was mostly written in assembly, but I started adding C++ support to integrate faster. However, with error checking everywhere, the code started [...]
